Hello
I am Linfeng Zhao (赵林风), a Postdoctoral Scholar at Stanford University, working with Prof. Mykel Kochenderfer and Prof. Jeannette Bohg at the Stanford Robotics Center.
I finished Ph.D. (2025) at Khoury College of Computer Sciences of Northeastern University, advised by Prof. Lawson L.S. Wong, where I closely collaborated with MIT LIS group and Prof. Leslie Kaelbling, and Prof. Robin Walters. I interned at Meta, Boston Dynamics AI Institute, Amazon, and Microsoft Research Asia. Before, I worked with Prof. Hao Su at UC San Diego (2018-19).
My research focuses on building human-level general-purpose agents that can act in the physical world—robots that navigate homes, manipulate objects, and accomplish long-horizon tasks in open-world scenarios with unseen environments and goals. I develop abstractions for decision-making that decompose complex behaviors into compositional building blocks. I develop learning and planning approaches to enable agents to reason about the world and plan their actions at decision time for scalable, generalizable, and efficient decision-making systems.
Learning and Planning with Structured Abstraction for Embodied Decision-Making
PDFUpdates
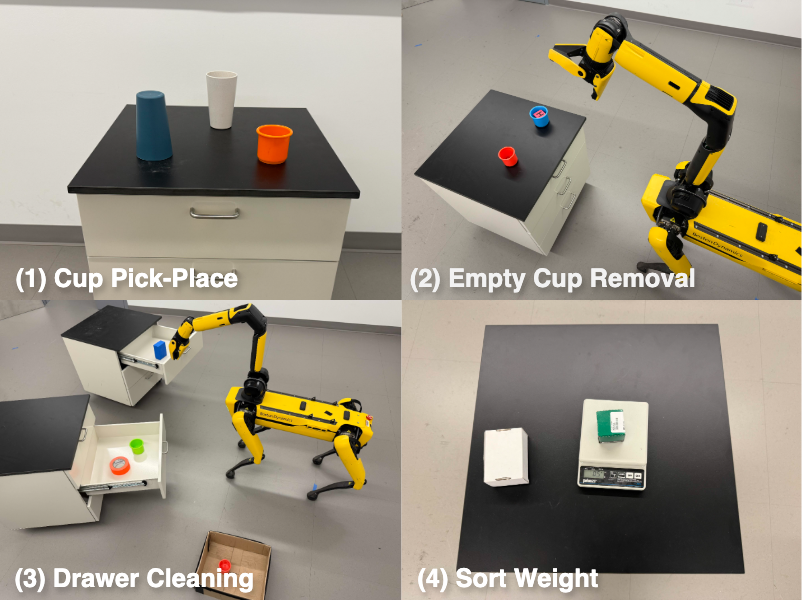
Robot Demos

Research Focus
Abstraction and Representation
Learning structured representations (symmetry, compositionality) for efficient generalization.
Planning and World Modeling
Developing world models and planning algorithms for long-horizon reasoning.
Decision-time Scaling
Scaling decision quality with more compute and interaction.
Mobile Manipulation
Enabling diverse manipulation skills on mobile robot platforms.
Selected Publications
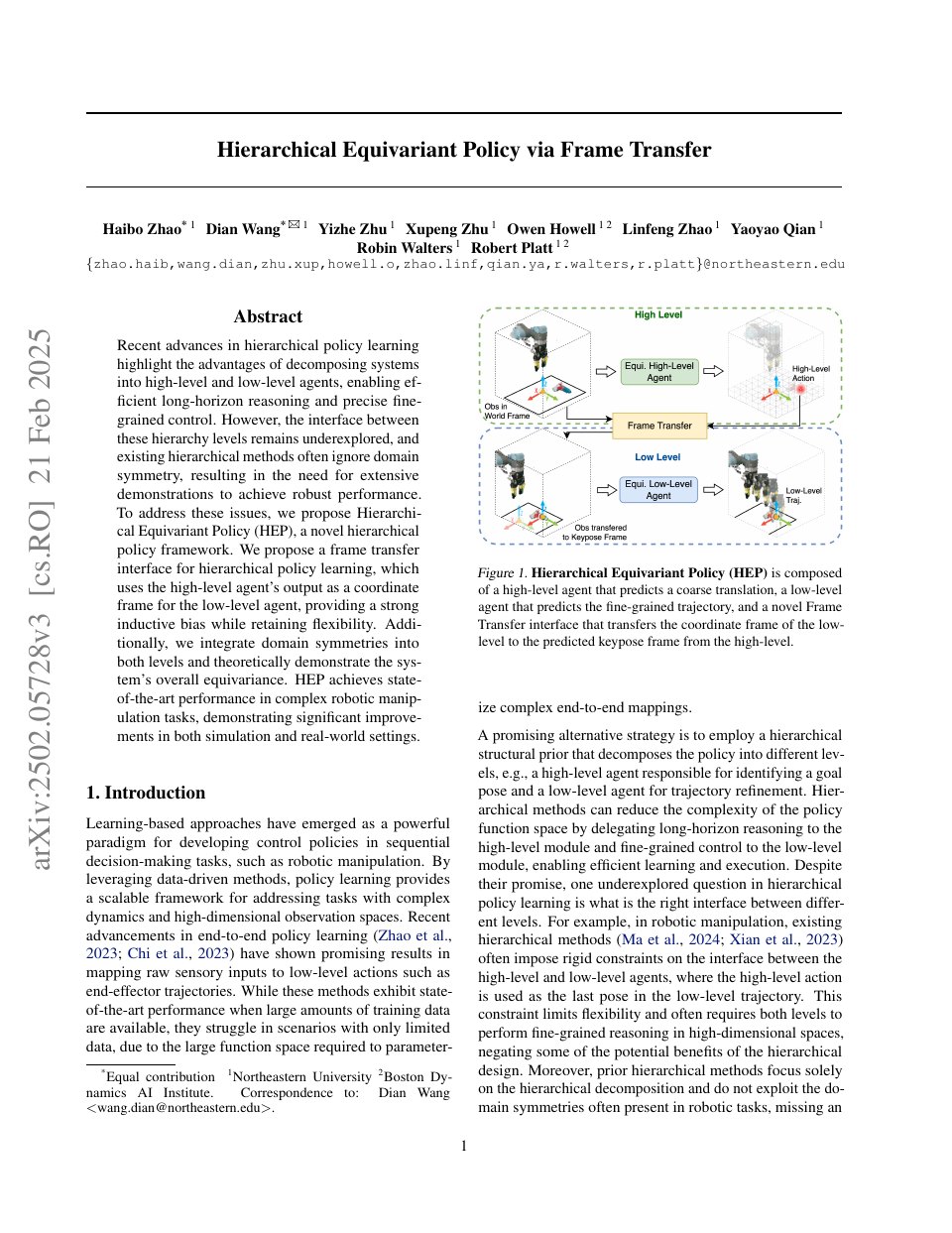
Action Map Policy: Learning 3D Closed-loop Manipulation via Pixel Classification
TL;DR
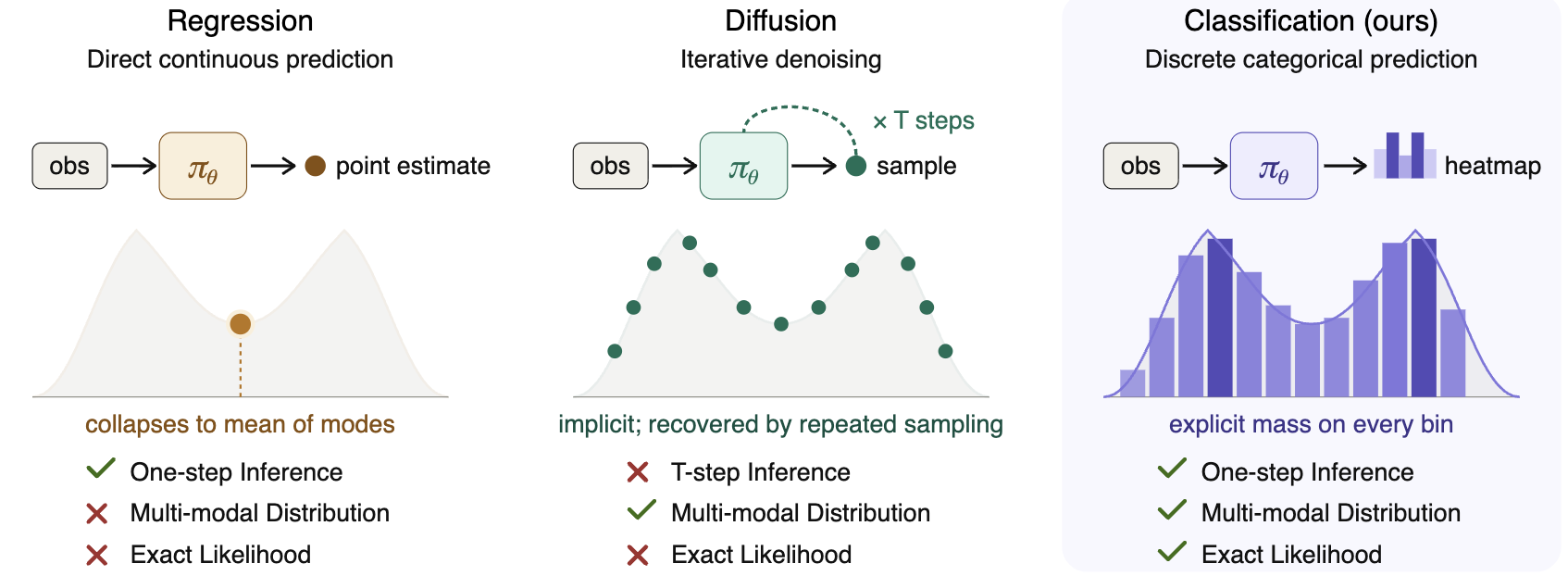
Pix2Act: Image-Space Manipulation Policies with Equivariant Augmentation
TL;DR

Retriever: Composing Closed-Loop Asynchronous Robot Programs
TL;DR
Seeing is Believing: Planning to Perceive with Foundation Models and Act Under Uncertainty
TL;DR
Learning and Planning with Structured Abstraction for Embodied Decision-Making
TL;DR
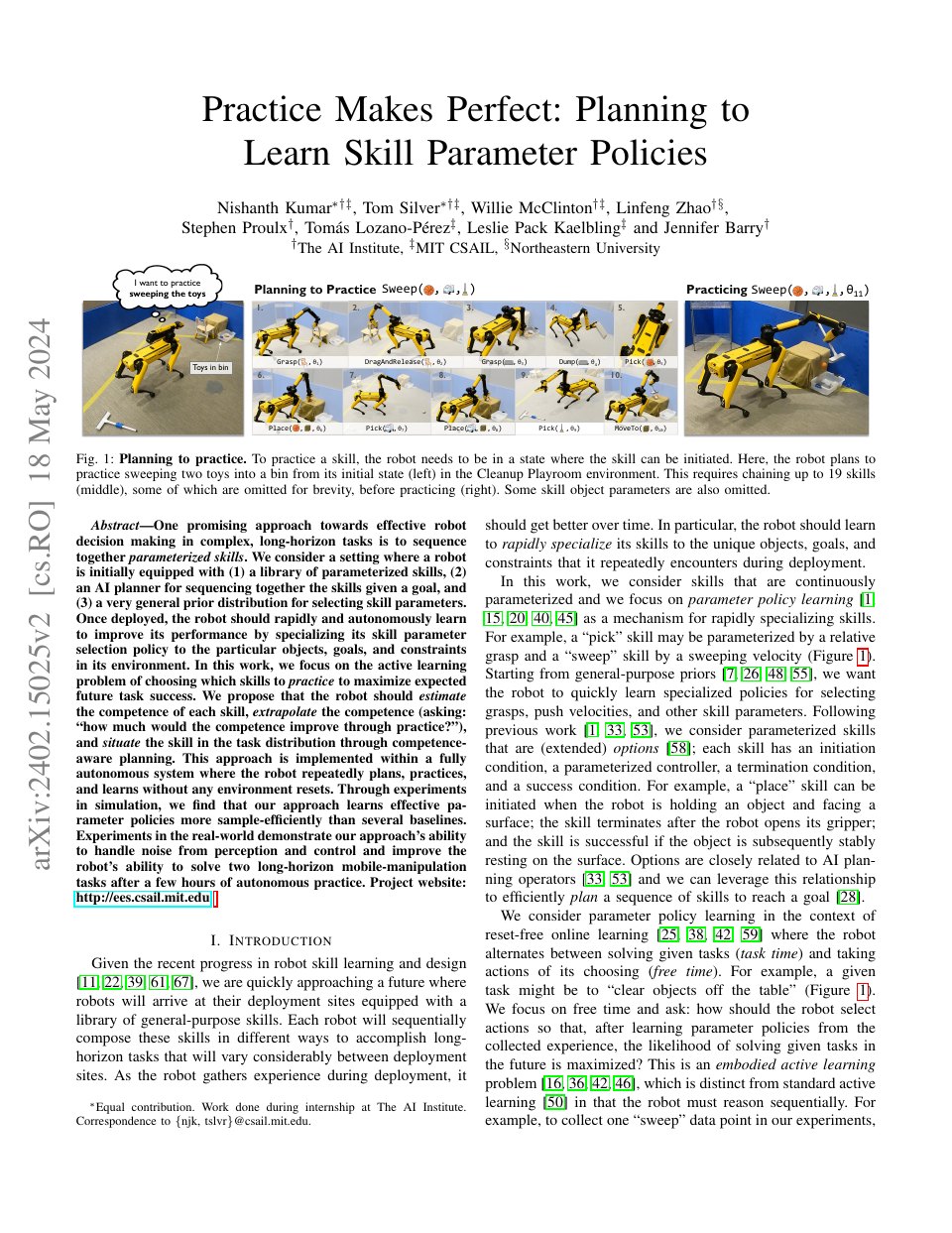
Practice Makes Perfect: Planning to Learn Skill Parameter Policies
TL;DR
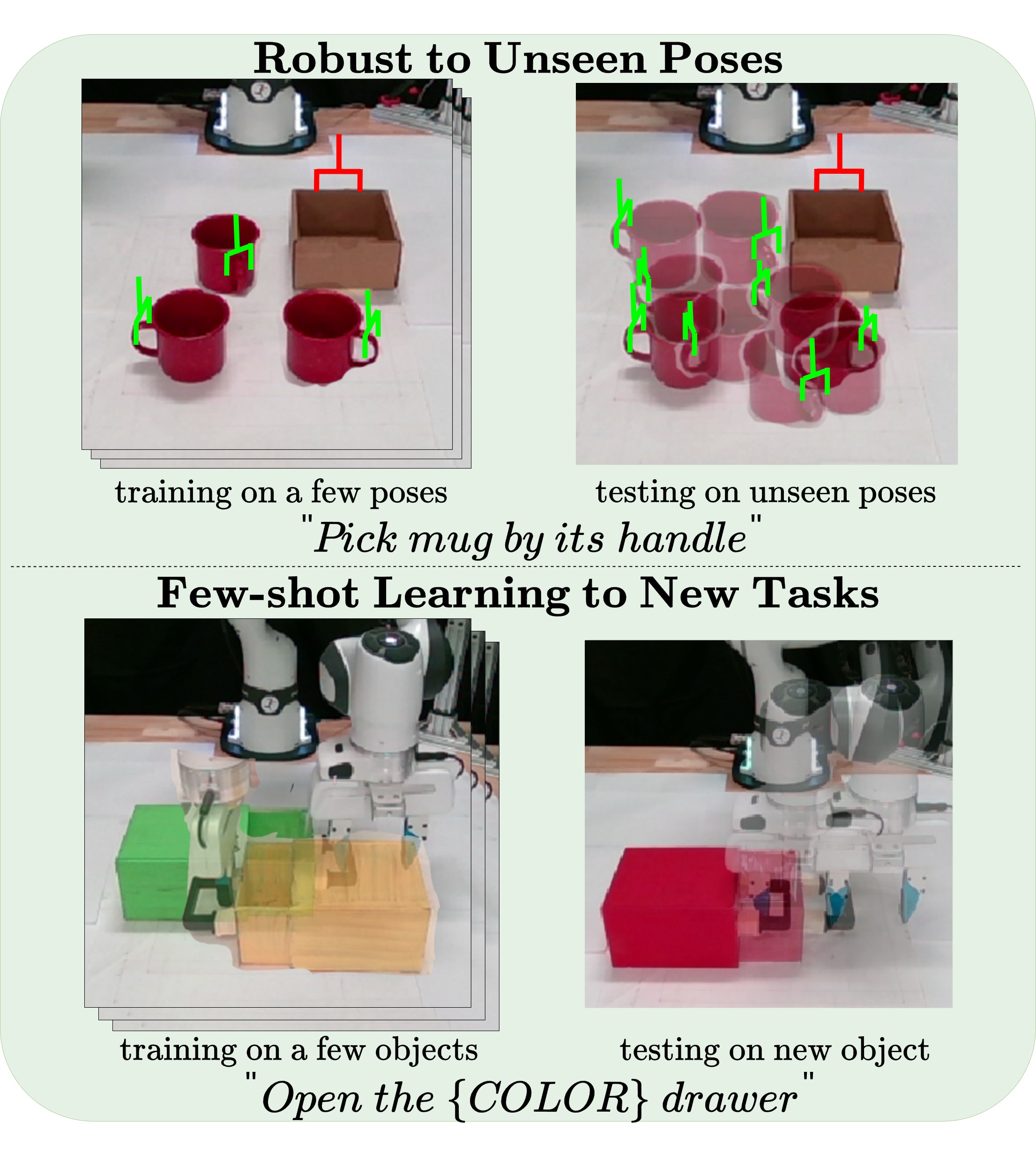
Equivariant Open-vocabulary Pick and Place via Language Kernels and Patch-level Semantic Maps
TL;DR
E(2)-Equivariant Graph Planning for Navigation
TL;DR
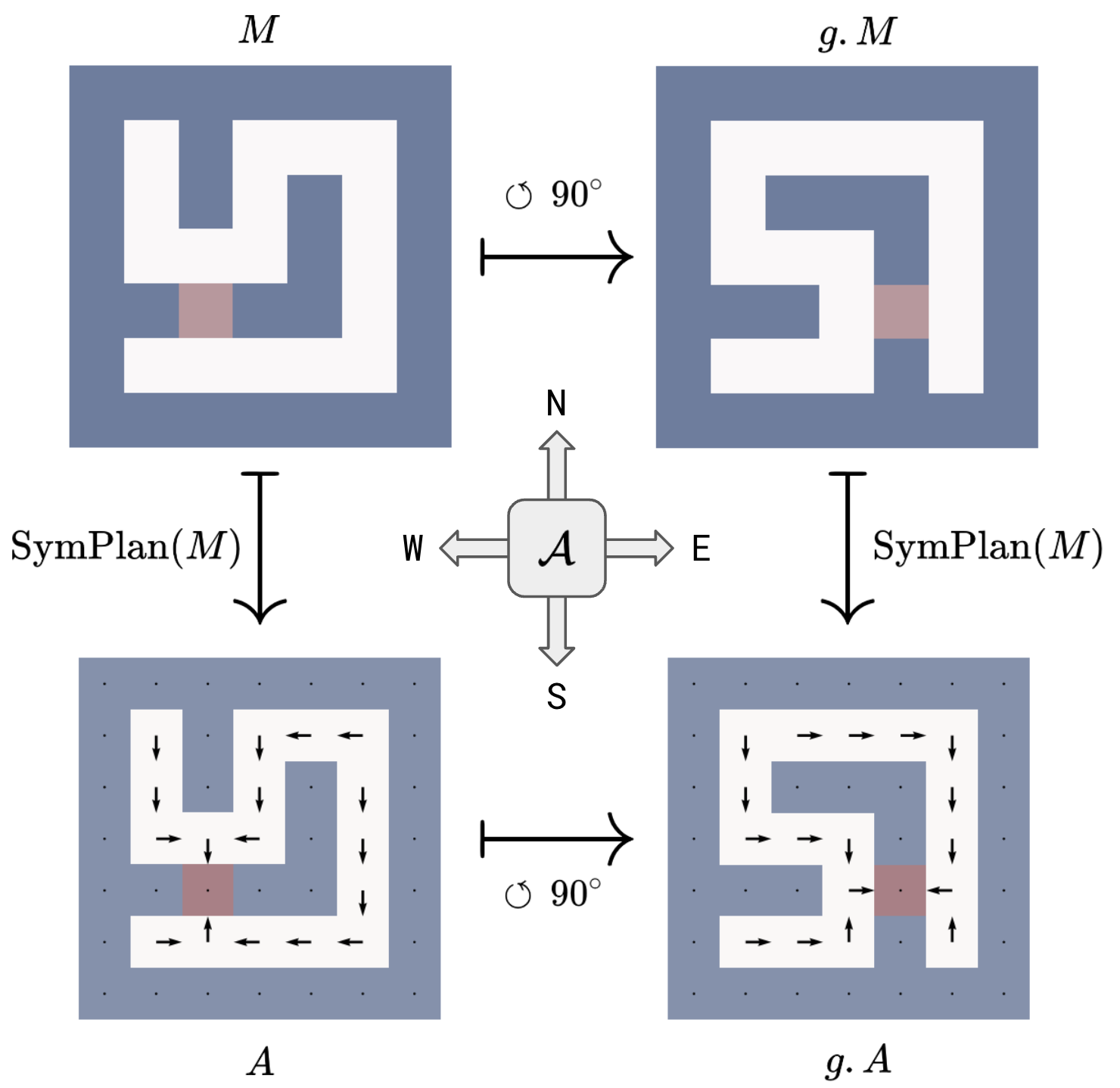
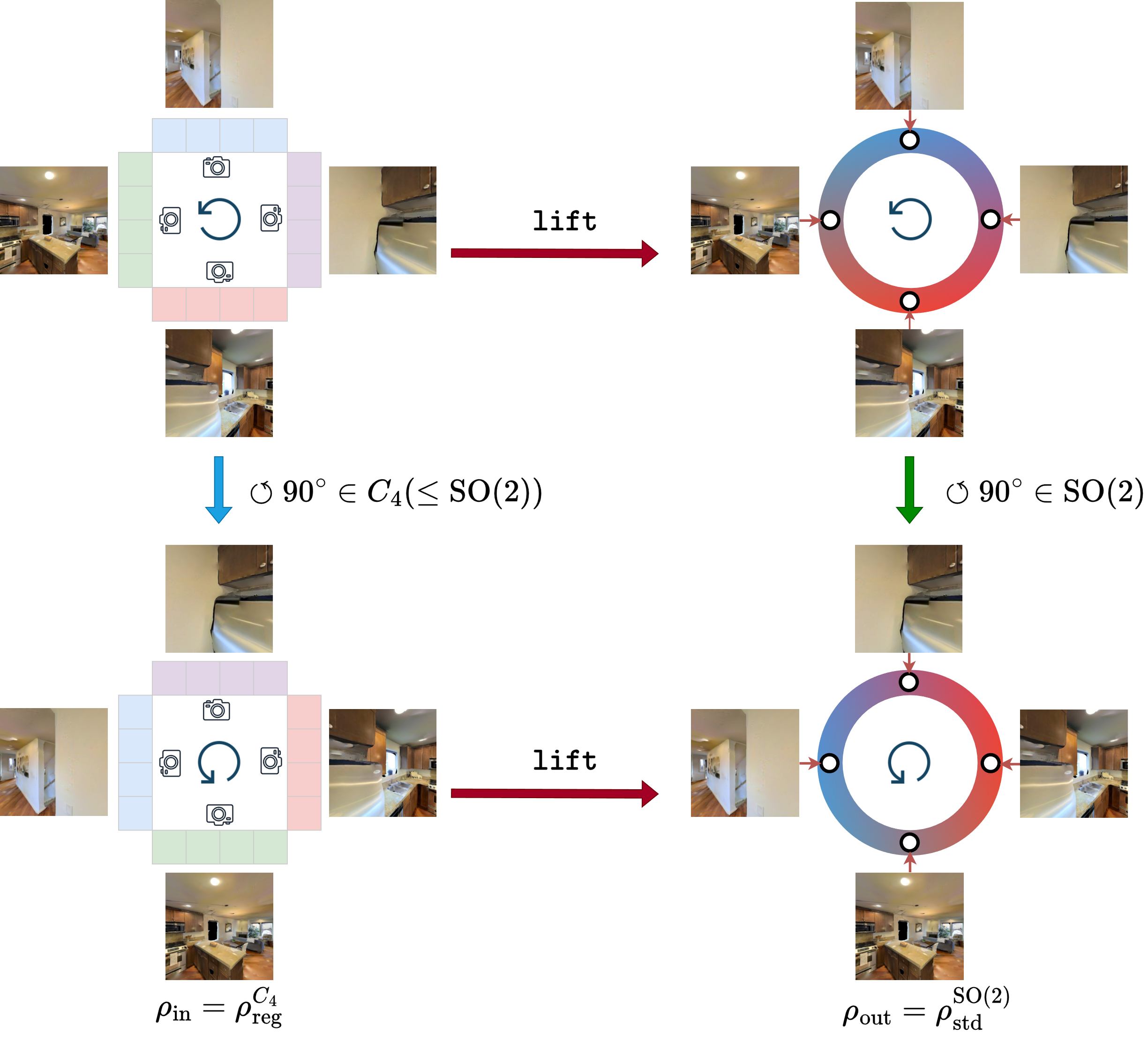
Integrating Symmetry into Differentiable Planning with Steerable Convolutions
TL;DR
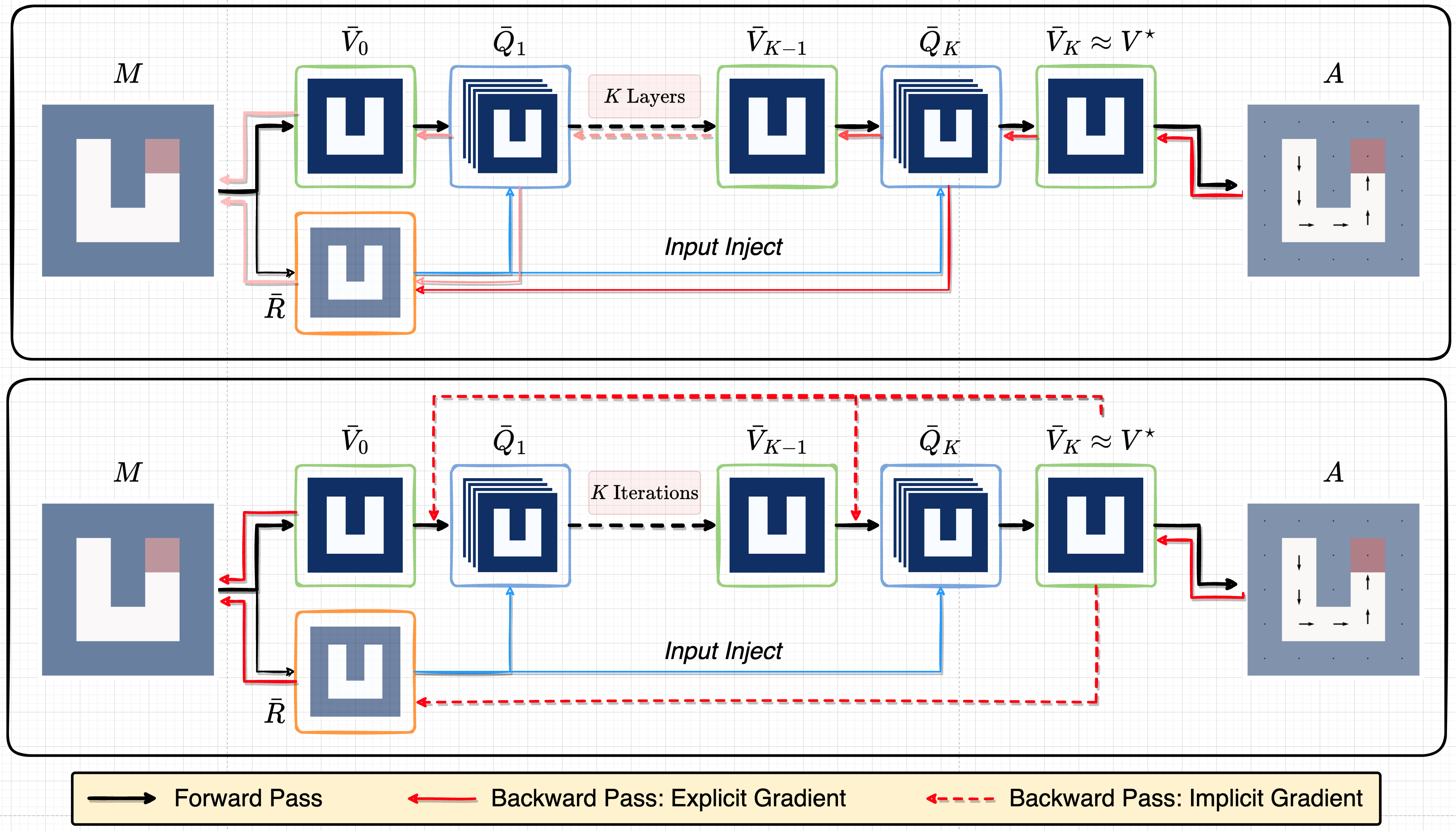
Scaling up and Stabilizing Differentiable Planning with Implicit Differentiation
TL;DR
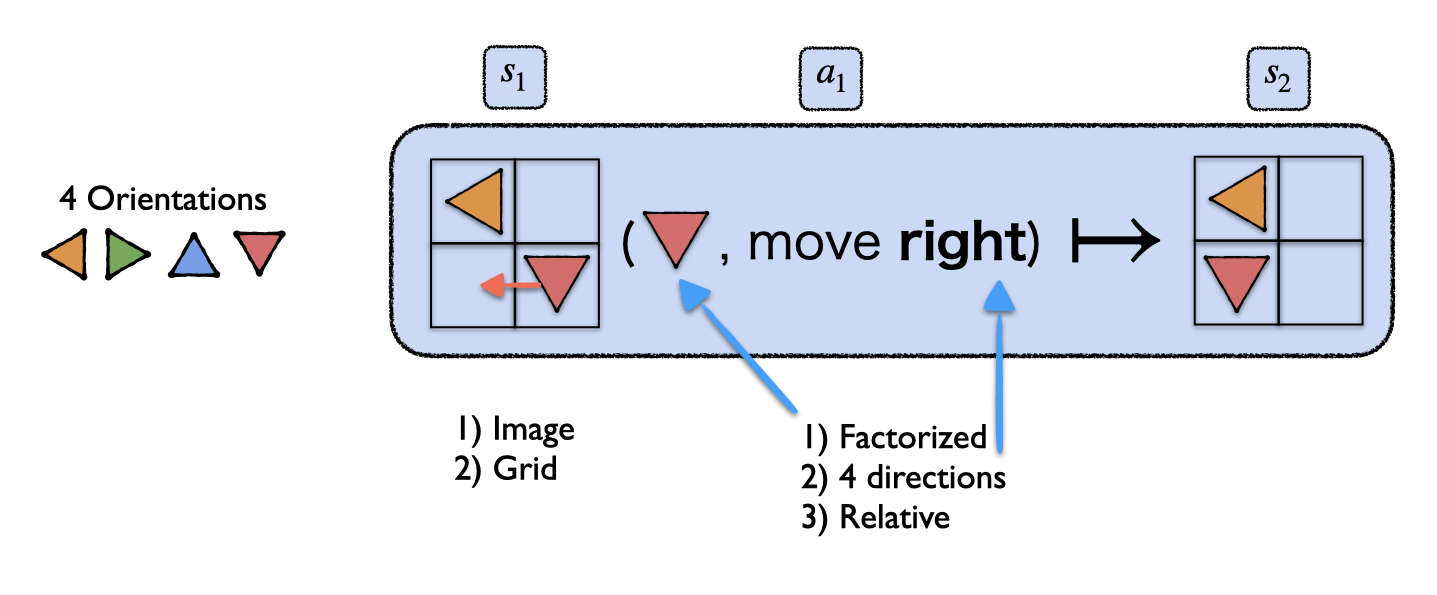
Toward Compositional Generalization in Object‑Oriented World Modeling
TL;DR